Roboino
Version 1.0
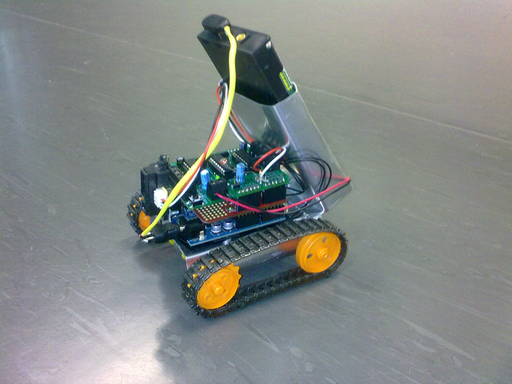
Dieser Roboter basiert auf Arduino und ist per WLAN steuerbar.
Er wurde im Rahmen eines Hochschulkurses von mir entworfen, gebaut und programmiert.
Dokumentation: roboino_projekt.pdf (3,8 MB)
Version 2.0
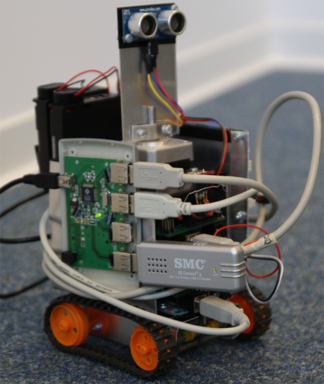
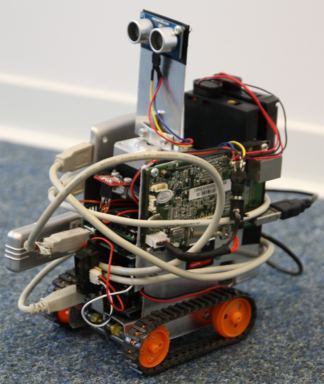
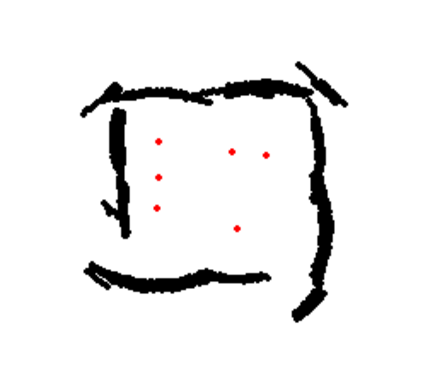
Aus obigem Roboter v 1.0, welcher per WLAN gesteuert werden konnte, wurde im Rahmen eines weiteren Hochschulprojektes ein Roboter, welcher autonom einen Raum einmessen kann (siehe Bilder oben).
Da der obige Roboter weiterverwendet werden sollte, stand der Kettenantrieb außer Diskusion, auch wenn dieser noch so ungünstig für genaues Einmessen sein mag. Da ich weiterhin endlich mal einen Roboter mit einem Ultraschallsensor bauen wollte (man könnte sich ja auch andere Methoden zur Entfernungsmessung einfallen lassen), war dieser Roboter mit einer Art Radar schnell konzipiert.
Aus dem einen Ardunio vom Roboter v 1.0 wurden hier schnell 2 Arduinos, da zusätzliche Sensoren geplant waren und evtl. eine vom Fahren unabhängige Messvorrichtung (daher müsste ein Arduino den Roboter fahren und der andere messen. Die anfallenden Daten müssen um ein autonomes System zu haben allerdings auch noch auf dem Roboter verarbeitet und zu einer Karte gebracht werden, wofür Arduinos allein dann auch nicht mehr ausreichten. Daher wurde hier (auch wieder, weil es noch rumlag) ein Sheevaplug genutzt.
Weitere Informationen sind in der Dokumentation nachzulesen: roboino2_projekt.pdf (8,1 MB).
News - Sidebar
Ubuntu Touch ist nun seit mehr als zwei Jahren mein Betriebssystem der Wahl auf meinem Nexus 4. Leider habe ich mir irgendwie den Update-Mechanismus zerschossen und so kurzerhand beschlossen, das System neu aufzusetzen. Den Prozess habe ich
in der ubuntu touch section dokumentiert.
In der
Audio-Sektion wird nun kurz erläutert, mit welchem Hilfsmittel man im Arrangement View von Ableton Live MIDI CC Parameter eines externen Instruments automatisieren kann.
In der
Audio-Sektion habe ich kurz niedergeschrieben, wie der Sound einer x0xb0x in Reason 7 per MIDI-Clock synchron geroutet werden kann.
In der
LaTeX-Sektion werden inzwischen Folien und weiteres zu einem LaTeX-Workshop verlinkt.
Unter
Projekte->ClusterGL habe ich ein paar Schritte zur Nutzung von ClusterGL online gestellt.
Unter
Projekte->NFC MobiDoc habe ich eine in einer Gruppe von 5 Stundenten inklusive mir umgesetzte NFC-basierte Krankenhausanwendung dokumentiert.
Heute habe ich ein Geschenk von Max bekommen - ein neues schönes Design. Vielen Dank an dieser Stelle!
Heute habe ich neben der Übersetzung ins Englische auch eine Featurelist für den Server aus dem
ROBERTA-Projekt erstellt.
Wer sein Git-Repository über HTTP mit Apache und aber ohne VirtualHosts (also ohne Subdomain) verfügbar machen will, findet unter
Anleitungen -> Vermischtes nun eine entsprechende Anleitung.
Wie man einen gcc Toolchain für ARM aufsetzt, findet sich ab sofort unter
Anleitungen -> ARM. Diesen nutze ich beispielsweise für die Programmierung von
OpenBeacon USB 2-RFID-Tags.
Wem das gleiche Glück mit dem Sheevaplug beschieden, der findet unter
Sheevaplug meinen Lösungsweg.
Wer einen seiner AVR Mikrocontroller verfust hat, findet unter
Anleitungen -> AVR nun einen rettenden Beitrag.