Roboino
version 1.0
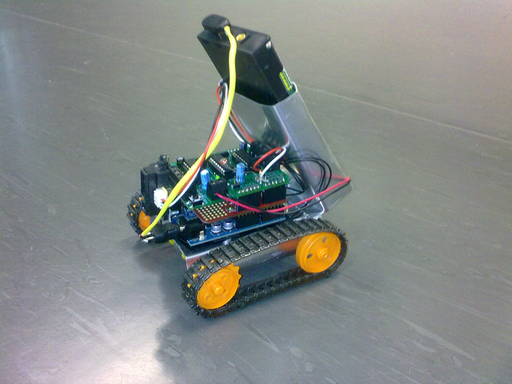
This robot is based on arduino and can be controlled via wireless LAN.
It has been designed and built by my as part of a university course.
documentation (german): roboino_projekt.pdf (3,8 MB)
version 2.0
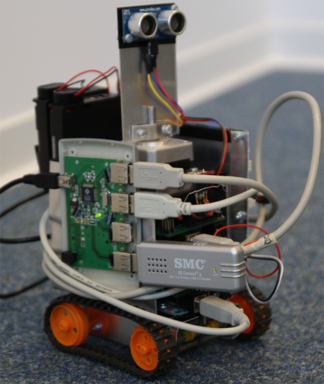
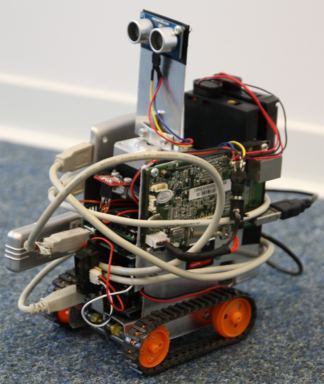
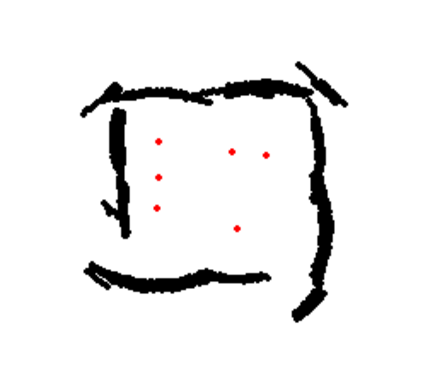

Based on the Robot v 1.0 that might be remote controlled via WiFi an extended autonomic room measuring robot has been developed in the context of a university course.
Reusing the upper robot for this, the chain-drive was not an issue although this might be very cumbersome for measuring a room because it makes driving the robot very unpredictable. As i allways wanted to use an ultrasonic sensor on a robot, this robot concept was rapidly developed.
The one arduino used in roboino v 1.0 morphed into two arduinos for v 2.0 as additional sensors where planned and the measuring aperature has perhaps to be moved while driving and sensing. The measured data has had to be processed and a map to be calculated. As the Arduinos themselfes are not sufficient for this task we decided to use an sheevaplug for this.
Further information can be read in german in this documentation: roboino2_projekt.pdf (8.1 MB).
News - Sidebar
